ma 25 mar, 2024 13:30
We zullen het allemaal wel herkennen... van die e-bikers die met 50-60rpm rondrijden... duidelijk mensen die niet weten hoe ze efficent moeten fietsen. Toch?Leeswijzer
- Vermogen: Dit is het vermogen wat wordt gelevrd op de as.
- Koppel/Torque: de hoeveelheid kracht die een fietser afleverd op het pedaal (koppelmoment).
- Cadans: toerental van de crank. Uitgedrukt in rpm (rounds per minute). Ja dat is Engels, bite me.
=> Cadans*koppel= vermogen
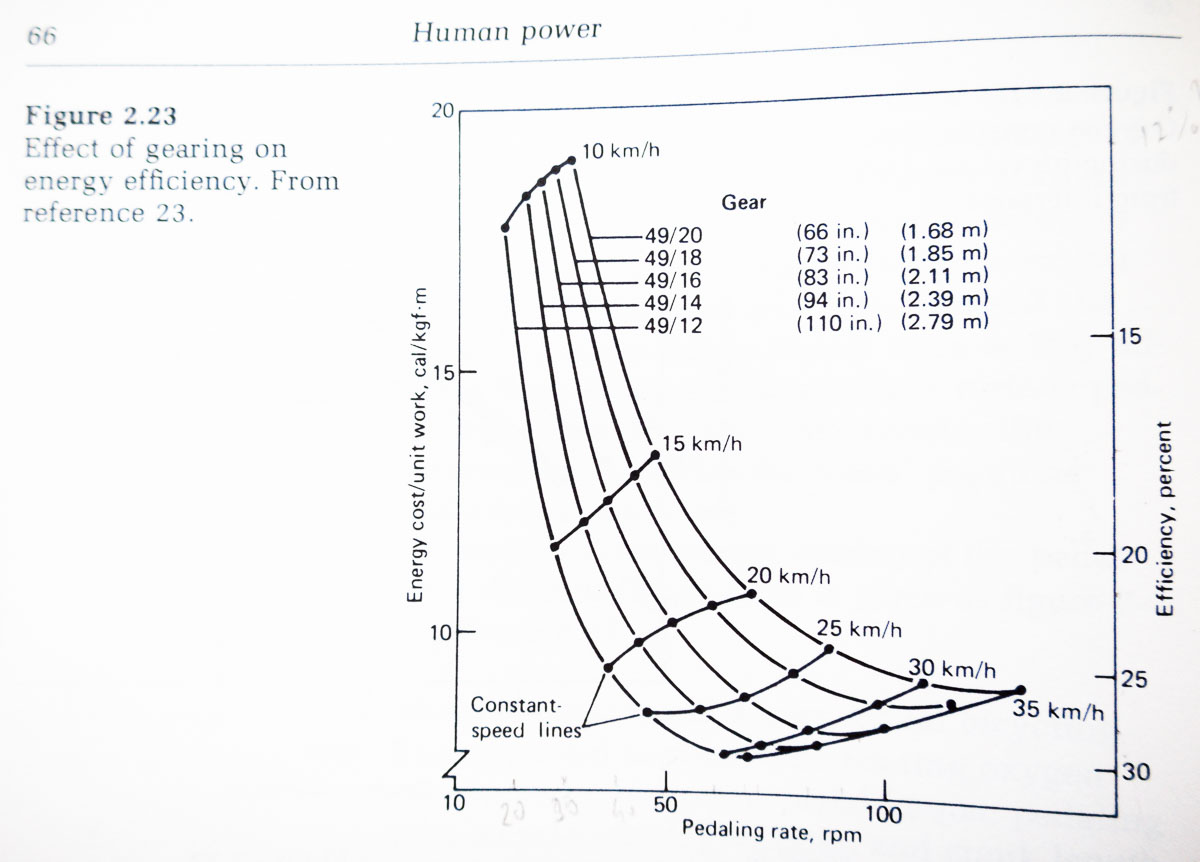
Het ligt allemaal wat lastiger. Qua efficientie is er een correlatie tussen geleverd vermogen en cadans... hoe meer je levert, hoe sneller je lichaam wil trappen. En dus als je minder levert wil je lichaam liever ook minder snel trappen.
Deze discussie komt nog steeds af en toe naar voren als het gaaat over e-bikes, belasting en actieradius.
Ik heb niet al te ver gezocht, maar hier een artikel waar dit wordt bevestigd:
https://www.cyclingweekly.com/fitness/w ... ome-191779
Wat betekent dit voor de ebike?“Most studies have found that 60 RPM is the most efficient. But when you look into it it’s generally in quite untrained people, and at a very low power for most people because they tend to do an average power and put that as the same for all participants, rather than a percentage of, say, their threshold power,” Turner points out.
Generally, the lower the intensity, the lower RPM is the more efficient one, but it also depends on what you’re doing. When working at higher intensities, threshold and beyond, Turner says that around 90 RPM is going to be more efficient.
- Hoe hoger de ondersteuning, hoe minder snel je lichaam wil trappen.
- Ook op eco is er sprake van een significante ondersteuning en wil je lichaam langzamer trappen.
Ga je dus op standje turbo met 25kmpu ga je inderdaad al snel op 60rpm fietsen, tenzij je je lichaam heel bewust dwingt/hebt getraind om inefficient te zijn.
Dan betreft actieradius.
Grof gesproken: hoe minder ondersteuning de motor hoeft te leveren, hoe verder je komt (ceteris paribus, alle omstandigheden gelijk).
Elke motor heeft een zogeheten ondersteunings curve, waarbij bij goede motoren aan de hand van snelheid en door de fietser geleverde koppel bepalen hoeveel ondersteuning er wordt geleverd. Het is dus niet zo dat als je met je volle gewicht een 53x11 optrekt je motor meteen vol ondersteunt, het is geprogrammeerd zodat je niet meteen wheelies trekt.
Wat goed is om te beseffen is dat koppel niet hetzelfde is als vermogen en dat je een gegeven vermogen met een oneindige bandbreedte aan cadans kan leveren. Als ik 300 watt lever kan dat met 50 rpm, 100rpm of 150rpm. In het eerste geval zal het koppel veel hoger liggen.
Motoren zijn dus geprogrammeerd om op een bepaalde, logische manier kracht te leveren. Je ziet hier dan ook een verschil in een naafmotor(achterwiel) en een middenmotor. Naafmotore meten vermogen aan de achteras. Middenmotoren meten koppel aan de trapas.
- Een naafmotor is daarom cadans agnostisch. Hij reageert op je geleverde vermogen en geeft de daarbij geprogrammeerde ondersteuning af. Spelen met de cadans doet daarom ook niets voor je acttieradius, spelen met vermogen wel. Aangezien vermogen een combinatie is van cadans en koppel heeft dit wel effect op de fietser: zet de ondersteuning laag, dan wil je snel trappen... en met ondersteuning laag kom je natuurlijk verder.
- Omdat een middenmotor niet aan de achteras meet moet hij gaan berekenen aan de hand van torque en cadans wat het vermogen is. Middenmotoren zijn behoorlijk cadans gestuurd en hebben een deel van de curve waarop ze het meeste vermogen leveren. Hieronder een verouderd plaatje (van Bosch, dus neem met een vrachtwagen zout)waarop je dit ziet:
Nogmaals, dat Bosch zichzelf geweldig vind moet je vooral negeren, bovendien missen er gegevens die deze grafiek redelijk zinloos maken. Maar het laat wel zien hoe zo'n ondersteuningscurve werkt (snelheid speelt dus ook een rol voor de controller, nog een reden om deze grafiek alleen als voorbeeld te nemen!)
Saillant detail: een Bosch motor wil liefst een wat hogere cadans zien, terwijl dat voor een ebike niet eens zo logisch is (want op een ebike wil je lichaam minder snel trappen...)
Ik herken dit in de praktijk... misschien dat autobezitter de "kickdown" kennen waarbij bij het accelereren de automaat terugschakelt zodat de motor meer rpm moet maken. Zo ook bij mijn Bosch performance line, als ik vol wil accelreren moet ik 1-2 versnellingen terugschakelen, anders vertikt de motor het om het volle pond te leveren. Het geeft ook aan dat je door een hogere cadans er niet voor zorgt dat de motor minder levert (dus een hogere actieradius), maar dat het bij Bosch zelfs andersom kan werken.
De Yamaha is daarentegen wel heel goed te knijpen door een hoge cadans te kiezen. De Yamaha is al een van de efficenstet modellen en door met 100rpm te gaan wordt het echt een spaarbrandertje (maar voor niks gaat de zon op, je krijgt dus ook veel minder ondersteuning).
Rijgevoel:
In mijn ervaring is rijgevoel niet bepaald door het type motor, maar door de programmering van de controller. De reden dat Bosch zo soepel aanvoelt komt doordat ze over een brede range vermogen blijven geven, maar of dat natuurlijk is, is lastig te beantwoorden. De meeste mensen vinden het in ieder geval wel prettig rijden.
Voordat mensen het vragen; Neodrive rijdt ook geweldig (mits en indien je regeneratie uit zet, maar dat is een persoonlijke mening), ze hebben heel veel werk in hun ondersteuningscurves gestopt. Er wordt geschermd met een "natuurlijk"rijgevoel, maar het is en blijft een dot kracht die je erbij krijgt, iets wat nooit echt natuurlijk zal aanvoelen. Dat Neodrive dit wat beheerster doet dan een Bosch PL is wel waar.
En voor wat het waard is: de oude ION voorwielmotor (!!!)reed ook heel fijn, zonder het gevoel dat je werd vooruitgetrokken, de controller was heel goed geprogrammeerd.
Ik ken ook "vreemd" rijdende achterwiel en middenmotoren, om maar niet te spreken van de gekkigheid van goedkope voorwielmotoren. Maar dat ligt niet zozeer aan waar de motor zit (al is een voorwiel nooit ideaal0, maar aan hooe goed de controller is geprogrammeerd.